3. TYPES (Part 1)
This chapter addresses the data type facility for the RED language. The use of
the various type features is explained and illustrated, the major issues underlying
the design decisions are discussed, and alternative approaches are compared.
Section 3.1 presents the notions of type and subtype and analyzes a set of
implementation techniques which can be used for code optimization.
Section 3.2 examines the type equivalence issue and justifies the approach
taken by RED.
Section 3.3 discusses the "type opacity" question: when a type is declared in
terms of an underlying type, what is the relationship between the two? Literals and
constructors are also described here.
Section 3.4 covers a variety of issues concerning the predefined RED types
BOOL, INT, and FLOAT, and explains why no fixed point facility was included.
Section 3.5 discusses a number of topics connected with enumeration types.
Section 3.6 addresses the design decisions relevant to aggregate types (arrays,
records, unions, strings, sets).
Finally, Section 3.7 is concerned with indirect (i.e., "pointer") types, their
use, and their implementation.
3.1 THE NOTIONS OF TYPE AND SUBTYPE
3.1.1 BASIC CONCEPTS
One of the most troublesome errors in assembly language programming is to apply
to a data item an operation inappropriate to the way the data should be used. For
example, treating an integer bit pattern as though it were an address (or even an
instruction); treating a floating point bit pattern as though it were a sequence of
characters. With the development of High Order Languages has come an understanding
that the best way to prevent such errors is via "strong typing" (SM 3A); that is, a
program's data are partitioned into (disjoint) categories called types and only such
operations may be applied to a data item as are consistent with its type.
In many cases, however, the notion of "type" is not sufficiently restrictive.
To illustrate this point, we consider the integer data type (INT, in RED). In the
interest of portability, readability and efficiency, Steelman 3-1C requires that the
lower and upper bounds of each INT variable be specified explicitly by the
programmer. These range bounds cannot be considered to be part of the type -- i.e.,
it would be incorrect for the language to define lNT(i..j) as a type -- for two
reasons:
- The bounds may be run-time determinable (3-1C), whereas the type must be
known at translation time (3A).
- It must be possible to write an assignment statement where source and
destination have different ranges, without requiring an explicit conversion
(3-1C), but implicit conversions between types are prohibited (3B).
Range bounds do not define new types, but rather serve to constrain the value space
of the (single) INT type and are called attributes associated with the INT type. A
type, together with values for its attributes, is called a subtype. Thus INT(l..10)
and INT(-i..i) are INT subtypes, denoting the integer ranges 1,2,...,10 and
-1,...-1,0,1,...i, respectively.
In RED, the notion of subtype applies uniformly to all types, whether built-in
or user-defined. A subtype must be specified for each variable at the time of its
allocation and cannot be changed during the lifetime of the variable. The values
for attributes may be computed at run-time and interrogated via a "dot
qualification" form. Either a subtype or a type may be specified at the declaration
of a formal parameter to a routine. Allowing a type with no subtype constraints to
appear in such contexts is extremely useful (and is, in fact,
required by SM 7G);
e.g., a WRITE procedure must be able to output INT values from arbitrary INT
subtypes.
The requirement in RED that subtype constraints be specified for variables is
somewhat stronger than is necessary to satisfy SM 3D which states that "the value of
a subtype constraint for a variable may be specified when the variable is declared."
We adopted the more restrictive (but uniform) rule in the interest of language
simplicity, readability, and efficiency. Note, however, that subtype constraints
are not necessary when a constant is declared. That is, the user may simply declare
CONST message := "MANUAL INTERVENTION REQUIRED";
instead of counting characters as in
CONST message : STRING[ASCII](28) := "MANUAL INTERVENTION REQUIRED";
As an illustration of the principles of type and subtype, it is straightforward
to write a function which finds the maximum value in an array of FLOATs
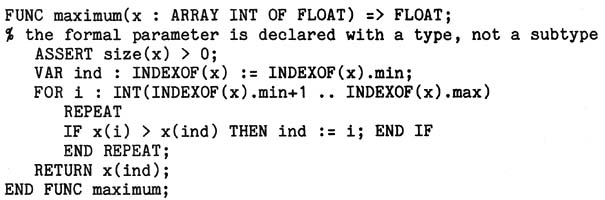
and to invoke the function on actual arrays of FLOATs:

Note that the following attempted declarations are illegal:
since subtype specifications are required for variable declarations.
A dot qualification form is used to interrogate the values of attributes, with
the attribute name used as the selector. This convention applies uniformly across
all types, built-in and user-defined. Thus, with the declarations

we have i.MIN=1 and i.MAX:1O (MIN and MAX denote the bounds attributes for INT
data), and v.n:8 (the formal parameter identifiers in type declarations denote the
attributes associated with user-defined types). The same notation was chosen for
both attribute inquiry and record component selection, since conceptually the user
can regard a data item as though it were a record comprising the values for the
attributes (constant for the lifetime of the data item) and a data value (modifiable
if the data item is a variable). We emphasize that in practice it is not always
necessary to store the values for attributes at run-time; this issue is discussed in
the next section.
3.1.2 IMPLEMENTATION ALTERNATIVES
Avoiding Run-Time "Dope Vectors"
A data item has a type (known at translation time) and a set of values for the
attributes associated with the type (in general, not known until run time). A
natural implementation is to store the subtype information -- the values for the
attributes -- at run time along with the data value (e.g., in a "dope vector").1 A
typical case where this would occur is array data. If a routine has a formal
parameter which is, say, an ARRAY INT OF BOOL, then the lower and upper bounds of
the array index can be passed at run time with the actual parameter to each
invocation of the routine.
This does not imply that such "dope vector" information must always be stored
at run time; there are important cases where the translator can effect considerable
efficiency by maintaining subtype information at compile time. For example, if the
user declares
VAR x : 1NT(1..8);
then the translator can keep track of the bounds values for x. Suppose that x is
passed as an actual parameter to a routine R which expects a formal parameter f of
subtype INT(m..n) where m and n are manifest. (The bounds of f can also be
maintained by the translator.) Independent of the binding class for f, no run-time
dope vector is needed for x:
- In the case of VAR or READONLY, the translator can check the validity of the
invocation R(x); the subtypes must be identical.
- With the other bindings, a run-time check may be necessary to ensure that x
is in the range m..n (before entry to R, when f is CONST), or that f is in
the range 1..8 (after exit from R, when f is OUT). The array bounds,
however, need not be stored with either the actual or the formal parameter
at run time.
If m or n is not manifest, then the translator can generate code which first
produces a dope vector for x comprising 1 and 8, and then passes as the actual
parameter the dope vector together with the value of x. Thus the dope vector need _
only be generated when it is required.
What does the translator do if the formal parameter is specified simply with a
type (INT) and not a subtype? In this case it can certainly take the second
approach mentioned above and generate the dope vector at the point of invocation.
If it is important to conserve storage for the executable code bodies, at the
possible expense of data storage and execution time, then such an approach can be
adopted. There are, however, two alternative techniques which can be employed.
First, the translator can regard the routine as though it were generic with respect
to the subtype of the formal parameter (it might adopt such an approach if the
routine contains the INLINE pragmat). For example, given the declaration
PROC p(f : INT); ... END PROC p;
the translator can produce separate versions of p for each different manifest
subtype of the actual parameters to invocations of p; if p is invoked with an actual
parameter whose subtype is not manifest, then an instance of p can be generated
which expects the range bounds of its formal parameter in a run-time dope vector.
As a second approach, the translator can avoid passing "dope vector"
information without relying on such expansion. The main point is that if the
attributes of a routine's formal parameter are not interrogated (directly or
indirectly) from the routine, then there is no need to store the values for these
attributes with the actual parameter when the routine is invoked. This is a
particularly useful optimization for CONST and READONLY parameters, especially for
attributes such as range which are relevant only for the target of an assignment and
which are thus not likely to be interrogated. In the above example, if the MIN and
MAX attributes of f are never used, then the range bounds for x need not be passed
at the invocation D(x) -- even when these bounds are not manifest. Note that, to
perform this optimization, the translator must check if f is passed as an actual
parameter to a routine which interrogates its formal parameter's attributes, etc.
Types Supporting Multiple Representations
As a general principle of language design, it is advisable to constrain data
types to single representations. In fact, one of the changes from Ironman to
Steelman was the deletion of the requirement that the language support multiple
representations per type. The basic problem with multiple representations is that
efficiency may be sacrificed (via run-time code to perform conversions between
representations) without the programmer's knowledge.
Although the full generality of multiple representations per type is not
justified, there are some important special cases where efficiency can be gained,
rather than lost, when the translator implements the same type under different
storage schemes. The two most frequent cases are INT and FLOAT, since many machine
architectures support integer data of different lengths (e.g., halfword, word,
doubleword) and floating point data of different precisions (e.g., single and
double).( The implementation issue may be summarized as follows: how can the
translator select the smallest storage unit compatible with the declaration of a
data item, and how can a routine be compiled if a formal parameter is specified with
type (rather than subtype)? For ease of exposition, we treat the INT and FLOAT
cases separately.
The selection of a storage unit for an INT variable can proceed as follows:
- When the range bounds are known at translation time, the minimum storage
unit which can support that range may be chosen.
- When the range bounds are determined at run time, it will frequently be the
case that the bounds of the range bounds are known at translation time. For
example, given the declarations
the translator can determine that the maximal range for x is
INT(m.min .. n.max); i.e., INT(0..1000). Thus the minimal storage unit
supporting this range can be chosen. (Note that the actual range m..n is
still used for checking on assignments to x; the bounds m and n will in
general be stored at run-time).
- When the range bounds are determined at run time but the approach of case
(2) is inapplicable, the translator can choose a storage unit consistent
with its efficiency considerations. In particular, it need not make "worst
case" assumptions; e.g., it may adopt full-word integers as the standard
representation and provide double-word representations only when manifest
bounds require them.
The preceding discussion focused on the translator's choice of a storage unit
for an INT variable based on the subtype information specified for it. what happens
when a formal INT parameter is declared and no subtype information is present,
either on the formal parameter or through ASSERTions? One approach is to treat the .
(routine as though it were generic with respect to subtype, as discussed earlier in
connection with dope vector avoidance. Alternatively, the translator can treat the
routine as though it were generic with respect to the representation. That is, each
invocation of the routine passes an INT of some particular representation (halfword,
word, doubleword), and a body for the routine can be compiled with the formal
parameter having the same storage unit as the actual. For example, if x and y are
halfword INTs, x+y could be compiled into halfword arithmetic; if they are full-word
INTs, full-word arithmetic code would be generated. It is important to note in this
regard that the language does not guarantee a unique maximal range for the results
of arithmetic operations; this allows the implementation to produce either a
halfword, fullword, or doubleword as the result of x+y, based on the sizes of the
operands and the size of the target for the result. Note also that if the
translator chooses the above approach and treats a routine with a formal INT
parameter as though it were generic with respect to representation, then it may
perform the analysis described earlier to avoid passing subtype information at run
time. That is, if the attributes of the parameter are not interrogated (directly or
indirectly) by the invoked routine, they need not be passed at run time.
The implementation of multiple representations for the FLOAT type is analogous
to INT, with respect to both the selection of storage size and the translation of
routines taking formal FLOAT parameters with no subtype information.
The determination of storage size is actually somewhat easier in the case of
FLOAT than with INT, since the specified precision when a FLOAT variable is declared
must be manifest (SM 3-1D). Thus the translator can choose a storage size (and
actual precision) large enough to support the specified precision, subject to a
target-machine dependent limit (e.g., double precision).
When a routine is declared with one or more formal FLOAT parameters lacking
subtype information, the translator has considerable flexibility regarding
implementation. At one extreme, the translator may represent all FLOAT data at
maximal actual precision and pass the subtype information (specified precision,
range bounds) as part of a run-time dope vector. This minimizes the number of code
bodies at the expense of run-time data storage and execution. Although clearly
unacceptable in production environments, such a strategy may be appropriate for
"debugging" translators, where speed of translation rather than object code
efficiency is important. At the other extreme, the translator may treat the routine
as though it were generic with respect to subtype. Thus the routine would have a
separate instantiation for each different manifest subtype of_actual parameters in
invocations, as well as instantiations which expect the range bounds in a dope
vector. For example, if x and y were declared to be of subtypes
FLOAT(4, 0.0 .. 1.0) and FLOAT(8, -10.0 .. 10.0) then the translator could produce
code for x+y which was tailored to these subtypes, taking into account that x has
single precision and y has double precision. This strategy conserves execution time
and data space at the expense of code space.
In practice, we expect a production-quality translator to take a compromise
position between these extremes and in the process generate efficient run-time code
without proliferating code bodies. In particular, the following strategy is
recommended:
- Treat routines as generic with respect to specified precision but not with
respect to range. Thus, with the above example, code for x+y could be
tailored to precisions 4 and 8.
- To avoid passing range bounds at run time, the techniques discussed earlier
in this section can be employed. For example, since the "+" routine does
not require the range bounds of its actual parameters (just a knowledge of
the precisions is sufficient), there is no need to pass these at run-time.
Note that in many cases the translator can optimize code space by treating a FLOAT
routine as though it were generic with respect to actual (instead of specified)
precision. In particular, if the specified precision of the formal parameter is not
interrogated (directly or indirectly) in the routine, then such an optimization can
be employed. For example, suppose that the user declares the following square root
function:
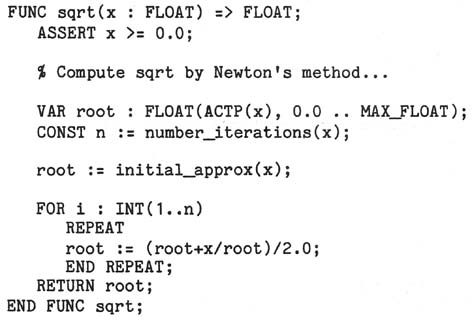
Provided that the routines to which x is passed as an actual parameter
(number_iterations, initial_approx, "/") do not interrogate the specified precision
of their formal parameters, the translator can produce just two versions of sqrt --
one for single precision and one for double -- without passing specified precision
at run-time.
Use of Type Declarations
In the preceding discussion we have looked at techniques which the translator
can use to implement subtypes efficiently. It should be noted that the programmer
can directly effect the production of efficient code, at the sacrifice of some
generality, by turning "subtype" information into "type" information. Specifically,
this allows the translator to avoid storing such information at run time, since it
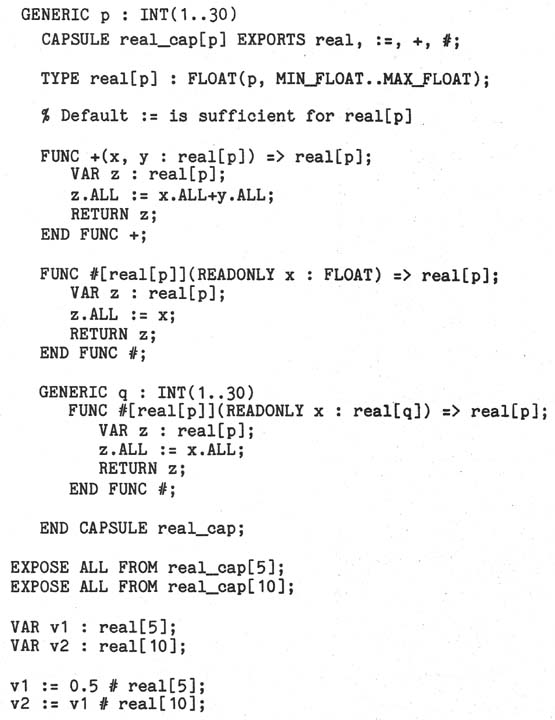
must be manifest and will be the same for each object of the type. The following
example shows how specified precision can thus be made to distinguish type:
Summary
In this section we have addressed the main issues concerning the implementation
of subtypes, focusing particularly upon techniques for maintaining and interrogating
subtype information at translation time instead of run time. The basic strategy is
for the translator to apply the same techniques which are used in the implementation
of the generic facility. An analysis of the application of these methods to two
important cases, the INT and FLOAT types, demonstrated how the translator can
produce efficient object code and take advantage of target-machine specific storage
representations.
3.2 TYPE EQUIVALENCE
3.2.1 INTRODUCTION
In a strongly typed language, one of the most important issues which must be
addressed is that of type equivalence2; i.e., when are two data items considered to
have the same type? The language rules in this area have major impact on the
usability, readability, simplicity, and efficiency of programs. In this section we
discuss the alternatives which were considered for type equivalence in RED, and
justify the decision which we made.) In summary, two type invocations in RED denote
the same type provided that their names are lexically identical, where a name is
obtained by expanding all abbreviations (if any) and then removing all
"round-bracketed" information. Type equivalence can always be checked at
translation time.
For example, with the data declarations

the types of x, y, and z are RECORD[a : INT, b : INT], RECORD[c : INT, d : INT], and
RECORD[a : INT, b : INT], respectively. Thus x and z have the same type, which is
distinct from the type of y.
The rules for type identity must take into account built-in types (such as
BOOL, INT, FLOAT), generated types (such as enumeration, record, array, union, and
indirect types), and new (i.e., user-defined) types. Moreover, the rules must be
consistent with the language conventions for type opacity; this implies that the
declaration of an ABBREViation does not introduce a new type, whereas the
declaration of a type does. Four alternative approaches were considered with
respect to type identity, which we will denote by the terms "pure name equivalence",
"structural equivalence", "single-instance generators", and "extended name
equivalence". The approaches differ primarily with respect to rules regarding the
equivalence of generated types.
3.2.2 PURE NAME EQUIVALENCE
The pure name equivalence approach simplifies the problem of type identity by
eliminating those cases which can cause complications. Under this scheme, it would
be illegal to invoke generated types except in the definition of new types. That
is, the attempted declaration

would be illegal, and the user would have to define a new type before declaring x;
e.g.,

The question of type identity would then be resolved simply by checking type
identifiers for lexical identity. (Two identifiers are considered "lexically
identical" if they are textually identical and correspond to the same declaration.)
This approach is basically that proposed for the Phase 1 RED language [Br78].
Its main disadvantage is that it introduces into programs a proliferation of type
names, many of which are only used once, with a resulting loss of readability.
Additionally, it interacts badly with subarray selection: with the type and
variable declarations for x_type and x given above, it is not clear what the type of
x(2..5) should be. As a result of these drawbacks, the pure name equivalence
approach was rejected.
3.2.3 STRUCTURAL EQUIVALENCE
At the opposite extreme from pure name equivalence, the structural equivalence
approach allows maximal freedom in determining type identity for generated types.
Stated somewhat loosely, any two invocations of the same generator would produce the
same type provided that their component types are the same. The following examples
illustrate the intent of this rule:
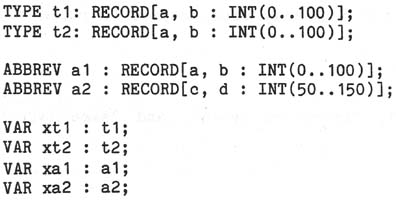
Variables xt1 and xt2 would have different types -- t1 and t2 -- whereas xa1 and xa2
would have the same type -- RECORD[INT,INT].
With the structural equivalence strategy, two enumeration types would be the
same if they comprise the same elements in the same order, and two array types would
be the same if their corresponding index types and component types are the same.
The rules for union types would be the same as for record types; field names are not
relevant with respect to type identity.
Problems with structural equivalence arise primarily in connection with
indirect types. First, the presence of cycles in ABBREViation declarations would
make it difficult for the reader to decide when two types are the same. Consider
the examples
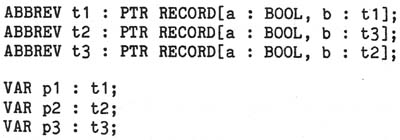
Do p1, p2, and p3 have the same type? Kieburtz et al; [KBH76] state a rule which
implies an affirmative answer: two indirect types "are judged equivalent if they
are alleged to be equivalent, and the allegation is not disproved by a structural
equivalence test upon the types pointed to." However, the formulation of a recursive
algorithm to solve the problem does not eliminate the confusion that readers of the
program are likely to feel.
The second problem with structural equivalence concerns the role of subtype
information in indirect types and arises when "anonymous" indirect types are allowed
(e.g., on data declarations). Suppose that the user intends to declare a variable
which is constrained to point to a string of a given fixed length. For example,

The assignment x2 :: x1 should not be permitted. (If it were, then either the
length information from x1 would be inherited by x2, conflicting with the
declaration of x2 which constrains the length to 10, or a subsequent assignment such
as x2(8) :: x2(1) could modify the contents of an arbitrary location in memory.) The
assignment x2 := x3 should be permitted only if n = 10. Thus, x1, x2, and x3 would
have the same type -- PTR STRING[ASClI] -- and subtype constraints 7, 10, and n
which are checked on assignment and parameter passing. Consider now, however, the
case where a variable is intended to point to strings of arbitrary length. One
possible syntax would be

The type of x4 is PTR STRING[ASCII], but the notion of the subtype of x4 is not so
clear, since x4 can be used more freely as the target of an assignment than can x1,
x2, or x3. If anonymous indirect types are permitted, as implied by the structural
equivalence approach, special rules would be needed in the language to explain the
role of subtypes for indirect types.
An additional problem with structural equivalence concerns the role of field
identifiers in record and union types. If the field identifiers are not relevant
with respect to type identity, then in the following example

z and p would have the same type, which was probably not the programmer's intent.
Although this problem could be solved with a suitable rephrasing of the language
rules, the difficulties intrinsic to structural equivalence when anonymous indirect
types are allowed have caused us to reject this approach to type identity.
3.2.4 SINGLE-INSTANCE GENERATORS
One possible compromise between the extremes of pure name equivalence and
structural equivalence is for each invocation of a type generator to produce a
separate type, even when the invocations are lexically identical. This approach
will be called that of "single-instance generators". For example, consider
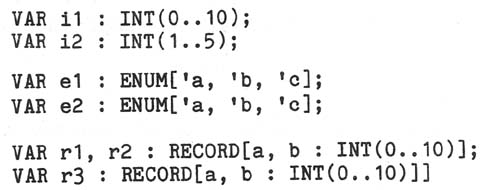
Since INT is a type (not a type generator), i1 and i2 would have the same type.
However, e1 and e2 would have different types (ENUM is a type generator); r1 and r2
would have the same type, different from the type of r3.
Although reasonably simple to implement, the single-instance generator approach
detracts from the ease with which the language could be learned and used.
- A semantically significant distinction is made between a type and a type
generator, but in practice it is not so easy to remember into which category
a given candidate falls. For example, there is no intuitive reason to
regard enumeration types as instances of type generators; given the analog
to integers with respect to range specifications, one might expect that e1
and e2 above should have the same type. In the case of user-defined (or
library-provided) types the issue is more subtle. For example, does
FILE[INT(O..100)] produce a new type every time it is invoked?
- The interaction with ABBREViations can lead to confusion. If the user
declares
ABBREV color_type : ENUM['red, 'yellow, 'green, 'blue];

then the semantics of
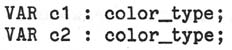
must be explained (and learned) very carefully. In particular, the
abbreviations cannot simply be expanded lexically (as one might expect),
since this would imply that c1 and c2 have different types.
- Type generators become useless on formal parameter specifications, since no
actual parameter (except possibly a constructor whose type was ambiguous)
could ever have the same type as the formal. For example, though it might
be useful to have a procedure which sorted arbitrary arrays of floating
point values, the straightforward approach of declaring

would not work, since the type of the formal parameter x would be a
different type from all other ARRAY INT OF FLOAT types.
- The fact that

would sometimes be equivalent to
(when T is a type), and sometimes not (when T is an invocation of a type
generator) is anomalous.
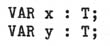
- It would become very clumsy to refer (in comments or informal discourse) to
the type of an object. Given the declaration

how does one describe the type of x? The denotation "ARRAY INT OF FLOAT"
would be incorrect, since this denotes a new type, distinct from that of x.
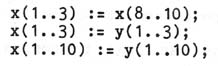
- The semantics of array slicing would be somewhat confusing. Given the
declarations

what is the type of x(1..3)? Which of the following assignments is legal?
The above problems have caused us to reject the single-instance generator
approach to type equivalence. Though some of these difficulties could be avoided by
the user's declaring new types instead of using anonymous generators, this would
reduce the approach to (and thus result in the drawbacks of) the pure name
equivalence scheme discussed earlier.
3.2.5 EXTENDED NAME EQUIVALENCE
Extended name equivalence represents a compromise between pure name equivalence
and structural equivalence- which avoids the anomalies of the single-instance
generators approach. The following are the essential attributes of extended name
equivalence.
- Anonymous (and abbreviated) indirect types are prohibited. Thus, if one
intends to use an indirect type, a new type must be declared.
- A game is derived from a type invocation by expanding all ABBREViations and
comma-separated field lists, and then removing all "round-bracketed"
information.
- Two type invocations yield the same type provided that their resulting names
are lexically identical.
These rules apply consistently to built-in, generated, and user-defined types, as
illustrated by the following examples:
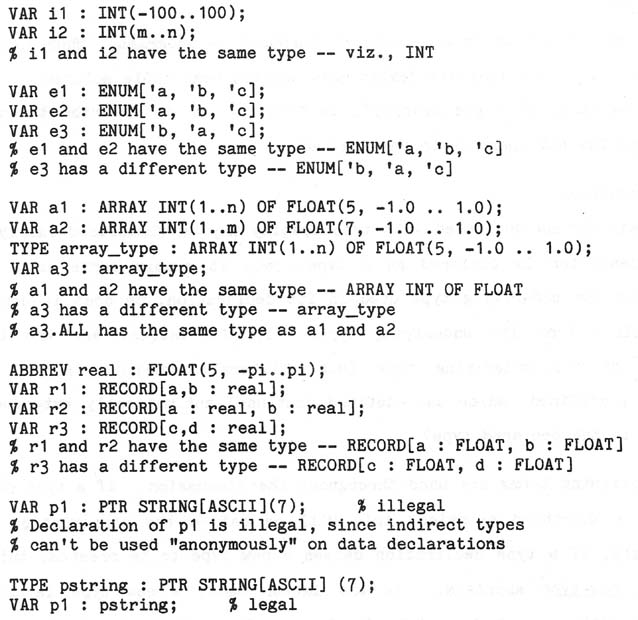
The extended name equivalence approach was adopted for the RED language because
it provides intuitively reasonable semantics without dictating a particular
programming style, and because it meshes well with the language's approach to types
and subtypes. It has an advantage over pure name equivalence in allowing anonymous
enumeration, array, record, and union types. It has an advantage over structural
equivalence in avoiding the non-intuitive semantics of anonymous indirect types and
in treating field identifiers as relevant to type identity. And it has an advantage
over single-instance generators in avoiding the variety of anomalous behaviors
described above.
***********
1
Note that "dope vector" information need not be stored contiguously with the data. Thus
several data items of the same subtype could share the same dope vector.
2
The terms "equivalent types", "identical types", and "same types" are used
interchangeably.




 Copyright © 2009, Mary S. Van Deusen
Copyright © 2009, Mary S. Van Deusen